Explainable Trajectory Representation through Dictionary Learning
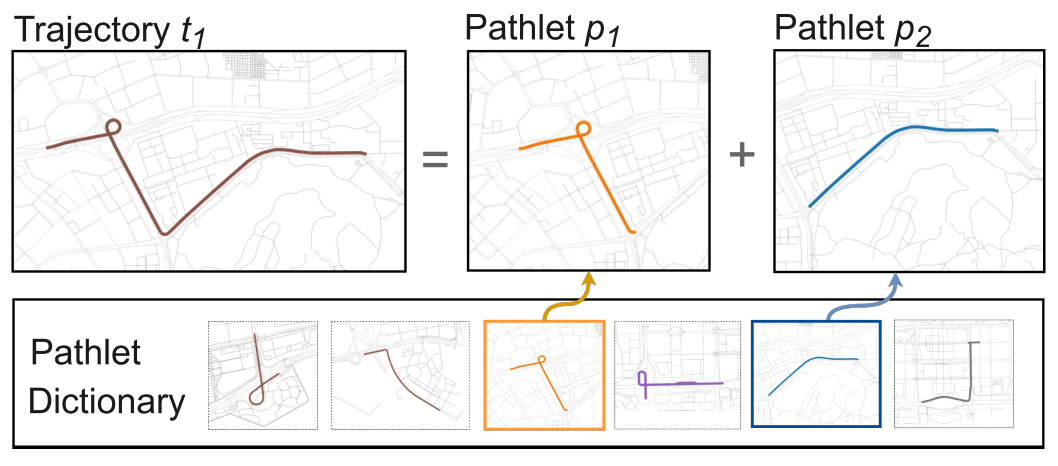
Trajectory representation learning on a network provides us with great opportunities to understand vehicular traffic patterns and benefits numerous downstream applications. Existing approaches using classic machine learning or deep learning lack interpretability and are inefficient to store and analyze in downstream tasks. In this paper, an explainable trajectory representation learning framework based on dictionary learning is proposed. Given a collection of trajectories on a network, it extracts a compact dictionary of commonly used subpaths called “pathlets”, which optimally reconstruct each trajectory by simple concatenations. The resulting representation is naturally sparse and encodes strong spatial semantics.
Theoretical analysis of the proposed algorithm is conducted to provide a probabilistic bound on the estimation error of the optimal dictionary. A hierarchical dictionary learning scheme is also proposed to ensure the algorithm’s scalability on large networks, leading to a multi-scale trajectory representation. Our framework is evaluated on two large-scale realworld taxi datasets. Compared to previous work, the dictionary learned by our method is more compact and has better reconstruction rate for new trajectories. In addition, we also evaluated the learned representation on the travel time prediction task. The result shows that our method outperforms neural-network based methods by 4.7% in prediction accuracy while providing interpretability.
Publication
| Yuanbo Tang, Zhiyuan Peng and Yang Li. Explainable Trajectory Representation through Dictionary Learning, In Proceeding of the 31th InternationalConference on Advances in Geographic Information Systems (SIGSPATIAL’23), November 13–16, 2023, Hamburg, Germany. | poster |
@INPROCEEDINGS{TangPengLi23,
author = {Tang, Yuanbo and Peng, Zhiyuan and Li, Yang},
title = {Explainable Trajectory Representation through Dictionary Learning},
year = {2023},
isbn = {9798400701689},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
articleno = {64},
numpages = {4},
series = {SIGSPATIAL '23}
}